
Selected Publications
A more complete list of peer-reviewed publications is available on my CV and my Google Scholar profile.
2024
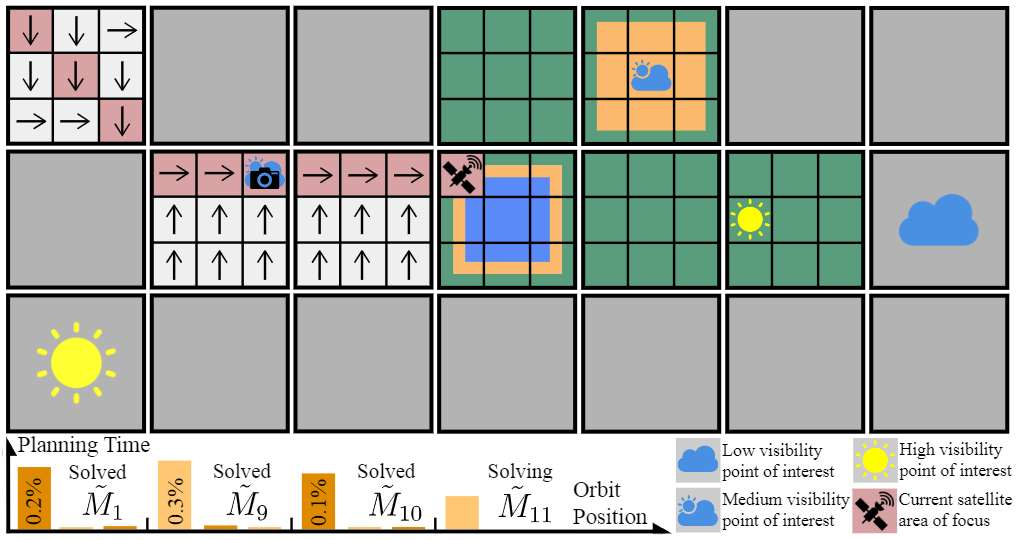
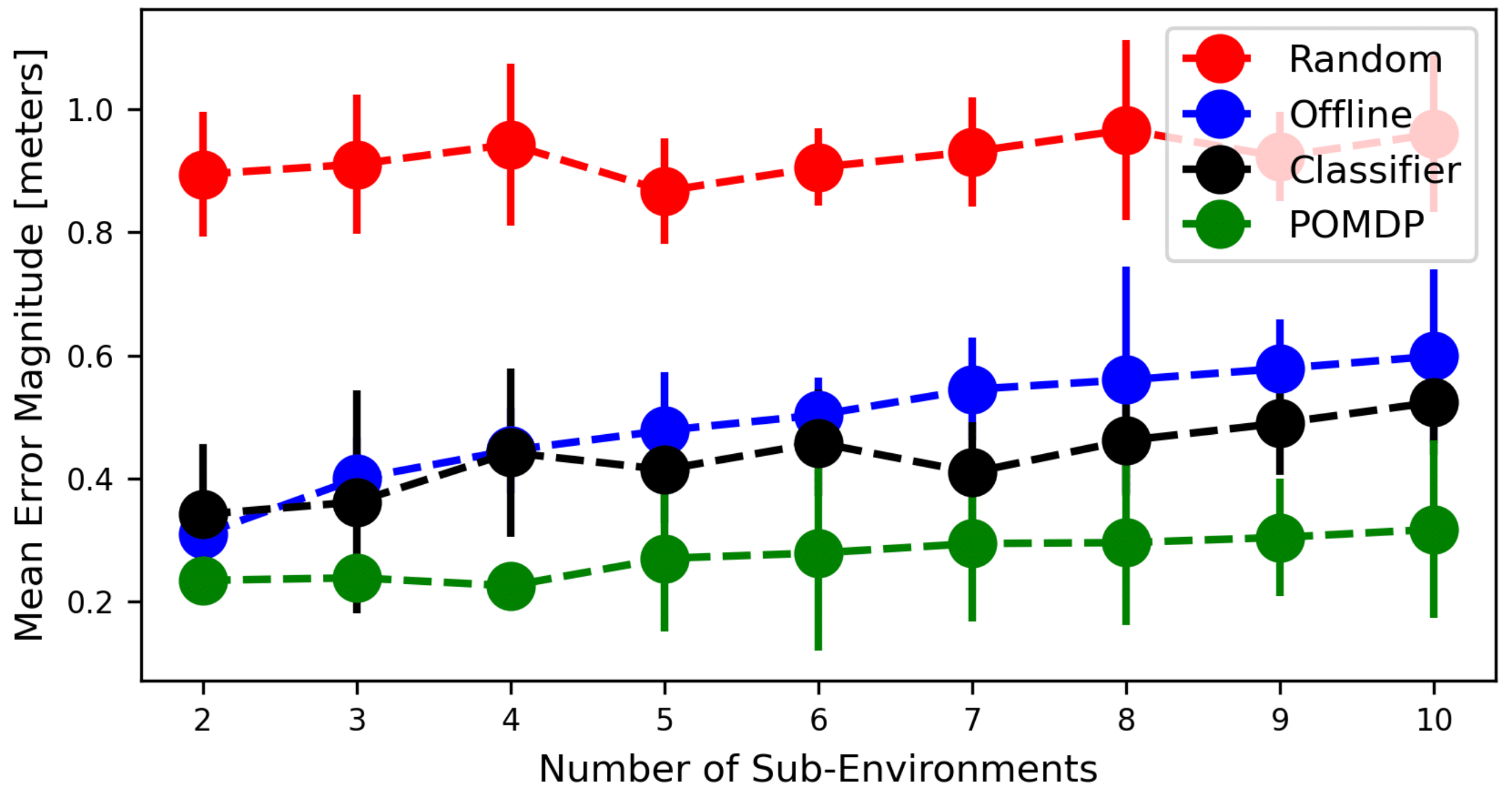 Choosing the Right Tool for the Job: Online Decision Making over SLAM Algorithms.
Choosing the Right Tool for the Job: Online Decision Making over SLAM Algorithms.
Samer B. Nashed, Rod Grupen, Shlomo Zilberstein.
ICRA 2024. [paper]
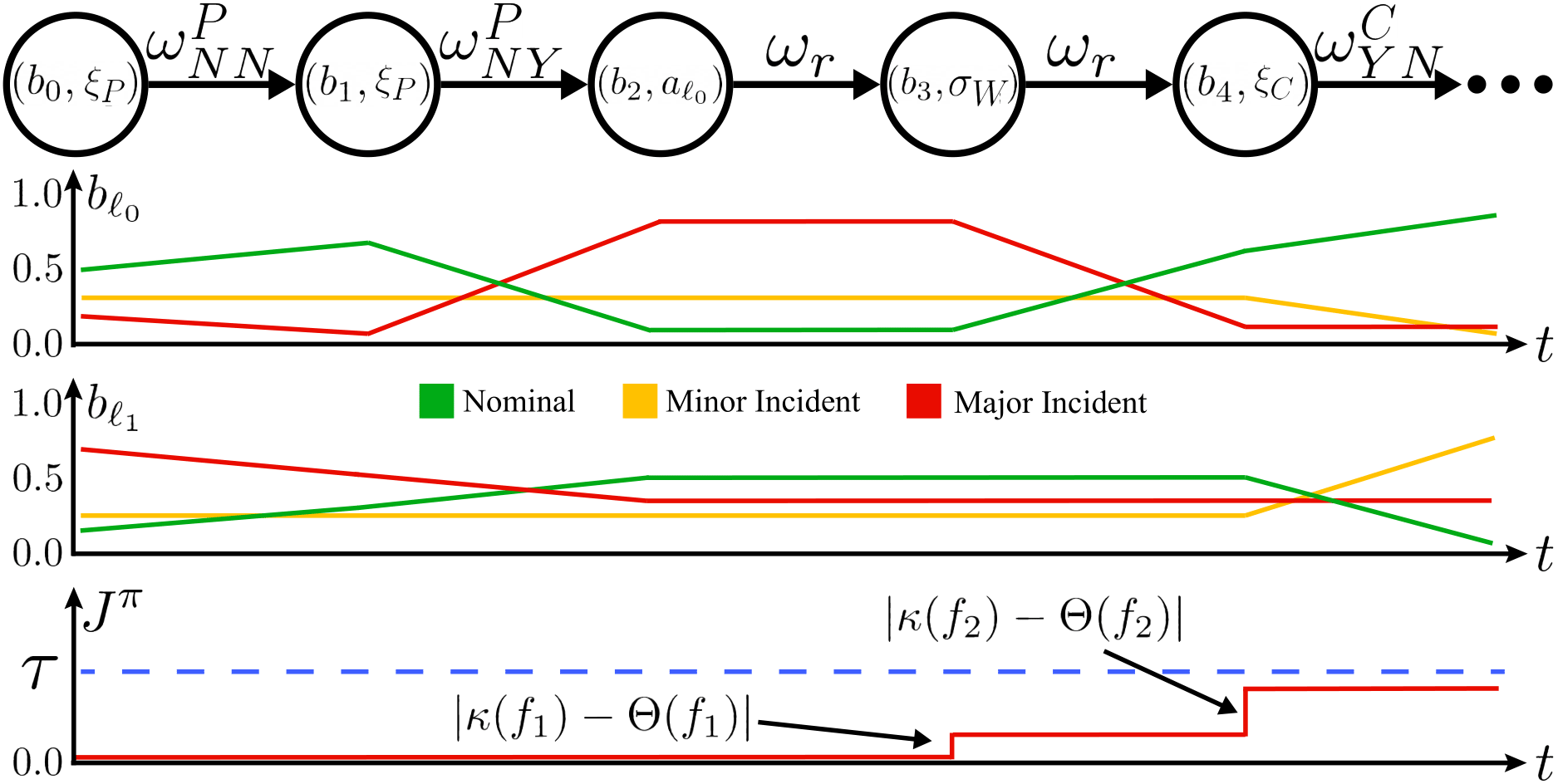 Ethically Compliant Autonomous Systems under Partial Observability.
Ethically Compliant Autonomous Systems under Partial Observability.
Qingyuan Lu, Justin Svegliato, Samer B. Nashed, Shlomo Zilberstein, Stuart Russell.
ICRA 2024. [paper]
2023
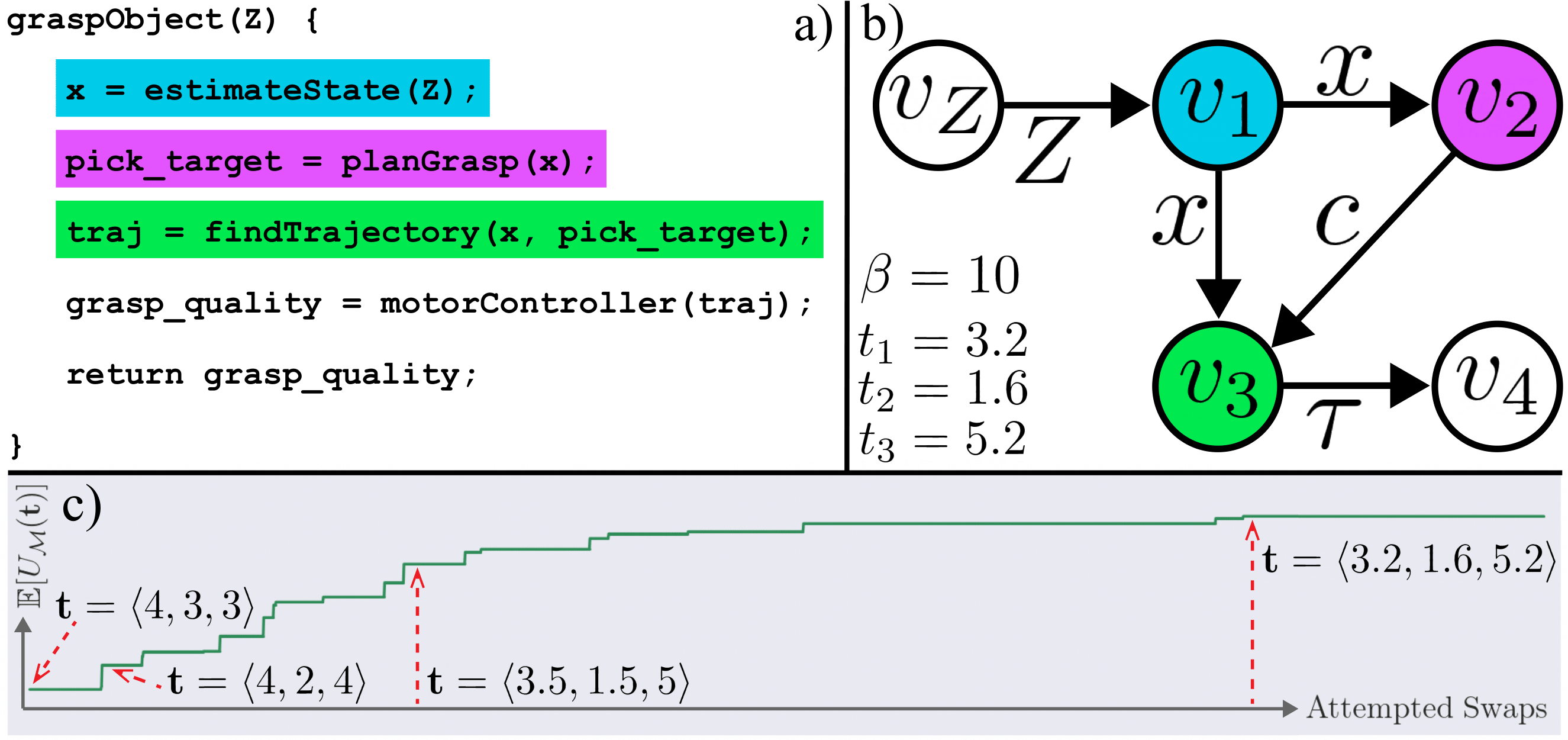 Formal Composition of Robotic Systems as Contract Programs.
Formal Composition of Robotic Systems as Contract Programs.
Mason Nakamura, Justin Svegliato, Samer B. Nashed, Shlomo Zilberstein, Stuart Russell.
IROS 2023. [paper]
2022
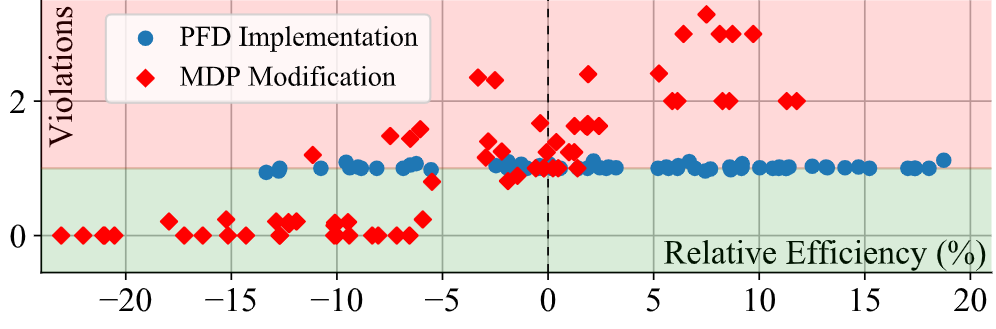
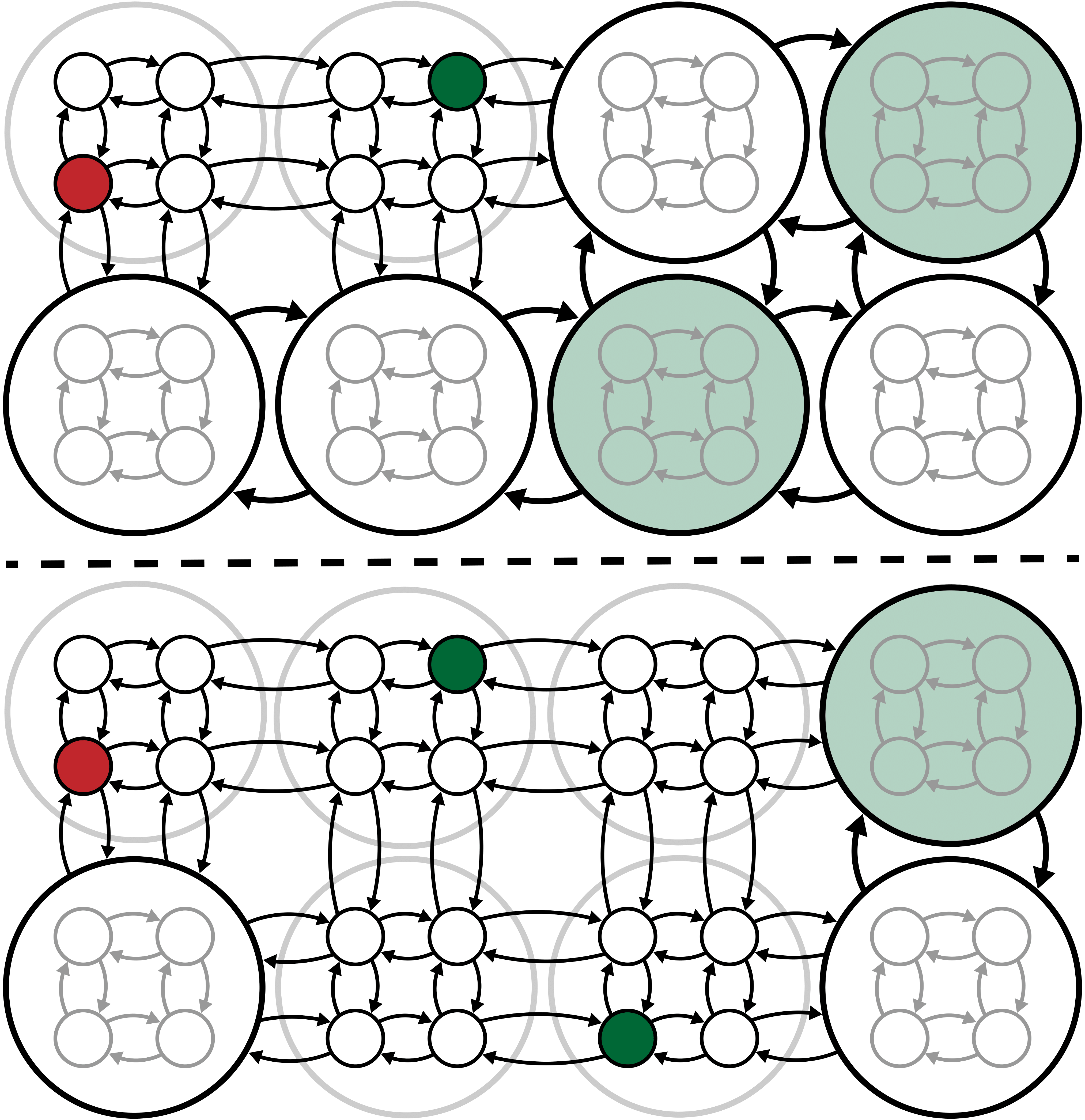 Selecting the Partial State Abstractions of MDPs: A Metareasoning Approach with Deep Reinforcement Learning.
Selecting the Partial State Abstractions of MDPs: A Metareasoning Approach with Deep Reinforcement Learning.
Samer B. Nashed, Justin Svegliato, Abhinav Bhatia, Stuart Russell, Shlomo Zilberstein.
IROS 2022. [paper]
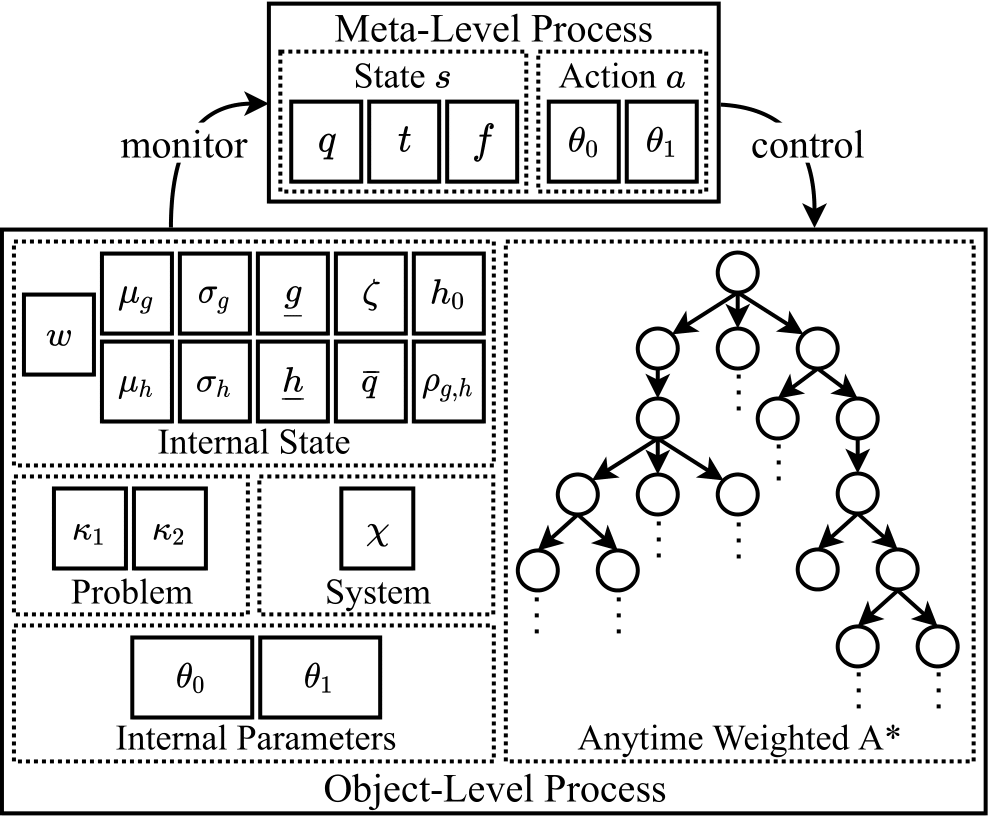 Tuning the Hyperparameters of Anytime Planning: A Metareasoning Approach with Deep Reinforcement Learning.
Tuning the Hyperparameters of Anytime Planning: A Metareasoning Approach with Deep Reinforcement Learning.
Abhinav Bhatia, Justin Svegliato, Samer B. Nashed, Shlomo Zilberstein.
ICAPS 2022. [paper]
 A survey of Opponent Modeling in Adversarial Domains.
A survey of Opponent Modeling in Adversarial Domains.
Samer B. Nashed, Shlomo Zilberstein.
JAIR. [paper]
2021
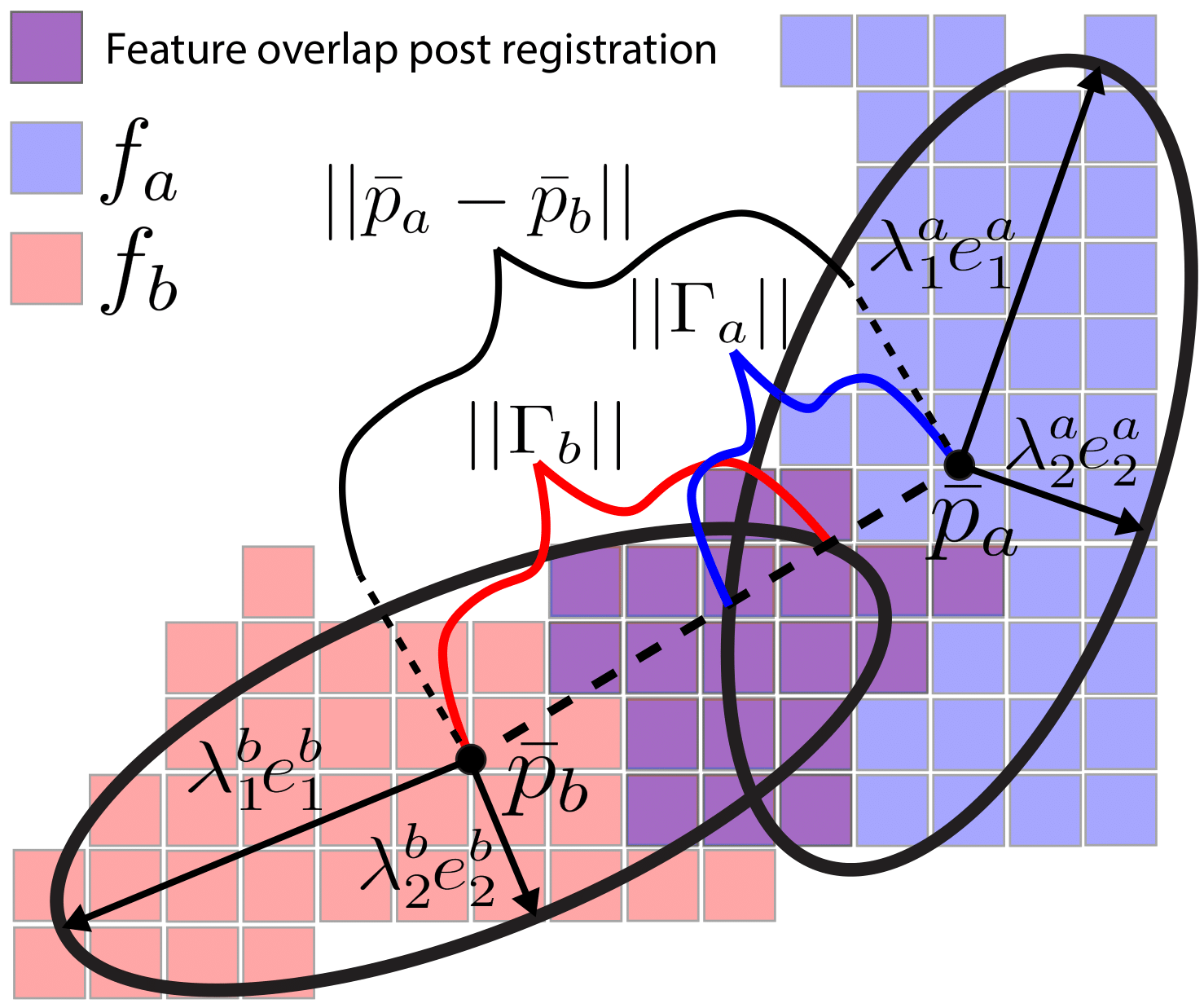 Robust Rank Deficient SLAM.
Robust Rank Deficient SLAM.
Samer B. Nashed, Jong Jin Park, Roger Webster, Joseph W. Durham.
IROS 2021. [paper]
 Solving Markov Decision Processes with Partial State Abstractions.
Solving Markov Decision Processes with Partial State Abstractions.
Samer B. Nashed, Justin Svegliato, Matteo Brucato, Connor Basich, Rod Grupen, Shlomo Zilberstein.
ICRA 2021. [paper]
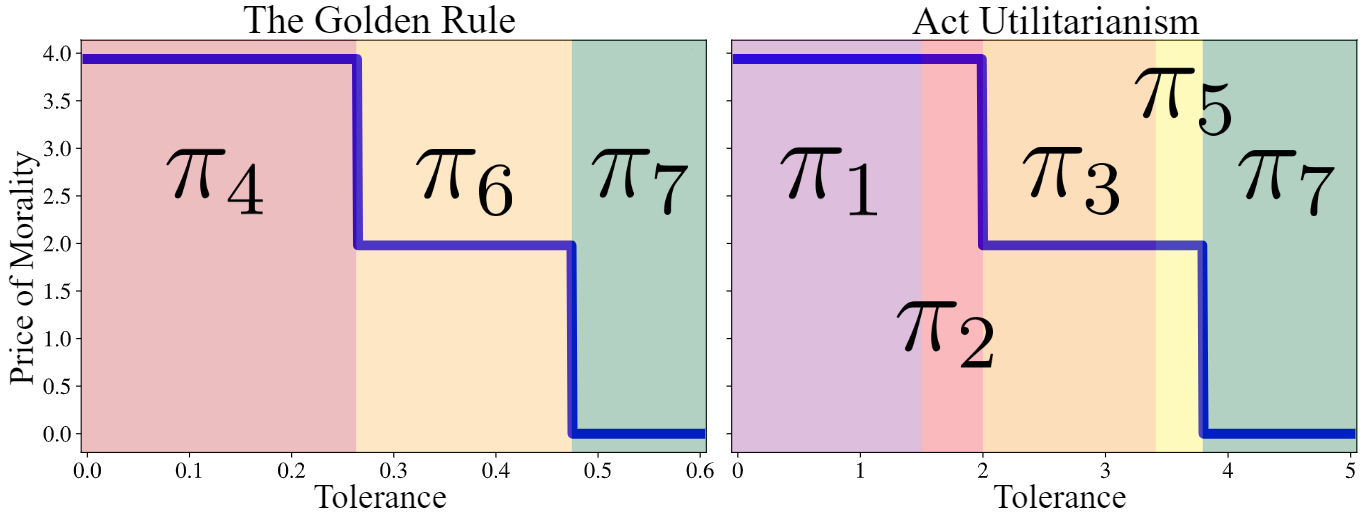 Ethically Complaint Planning within Moral Communities.
Ethically Complaint Planning within Moral Communities.
Samer B. Nashed, Justin Svegliato, Shlomo Zilberstein.
AIES 2021. [paper]
 Ethically Compliant Sequential Decision Making.
Ethically Compliant Sequential Decision Making.
Justin Svegliato, Samer B. Nashed, Shlomo Zilberstein.
AAAI 2021. [paper]
2020
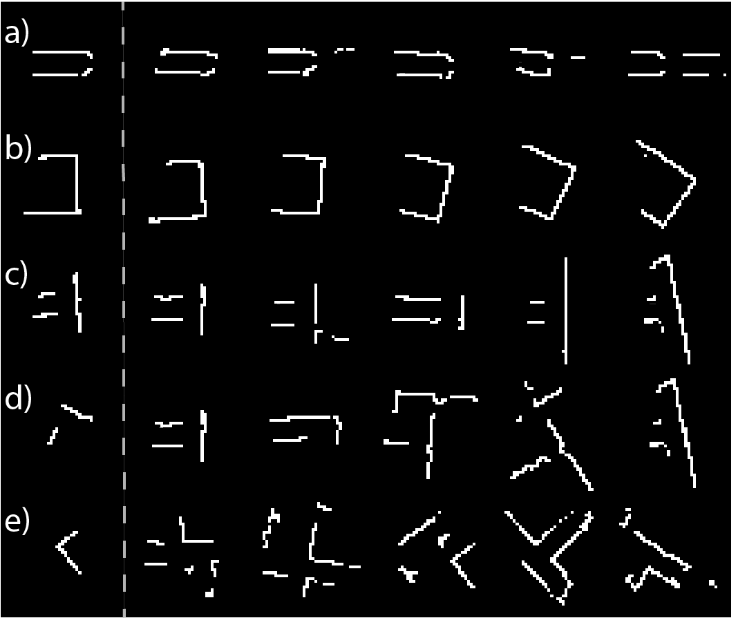 Laser2Vec: Similarity-based Retrieval for Robotic Perception Data.
Laser2Vec: Similarity-based Retrieval for Robotic Perception Data.
Samer B. Nashed.
IROS 2020. [paper]
2018
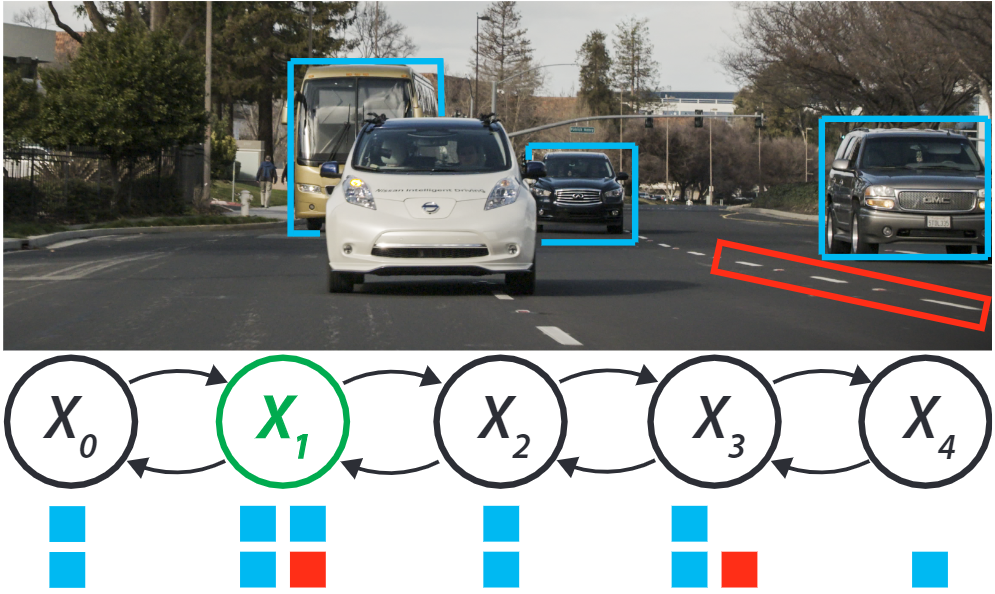 Localization under Topological Uncertainty for Lane Identification of Autonomous Vehicles.
Localization under Topological Uncertainty for Lane Identification of Autonomous Vehicles.
Samer B. Nashed, David M. Ilstrup, Joydeep Biswas.
ICRA 2018. [paper]
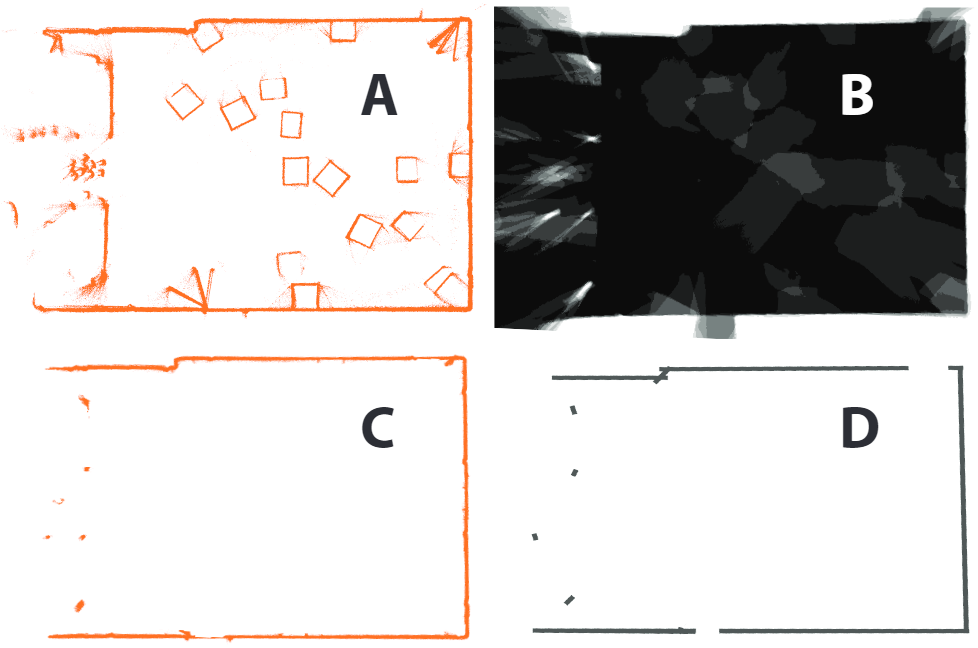
 Human-in-the-Loop SLAM.
Human-in-the-Loop SLAM.
Samer B. Nashed, Joydeep Biswas.
AAAI 2018. [paper]
2016
 Curating Long-term Vector Maps.
Curating Long-term Vector Maps.
Samer B. Nashed, Joydeep Biswas.
IROS 2016. [paper]